RTK-Empfänger
Auf den Zentimeter genau
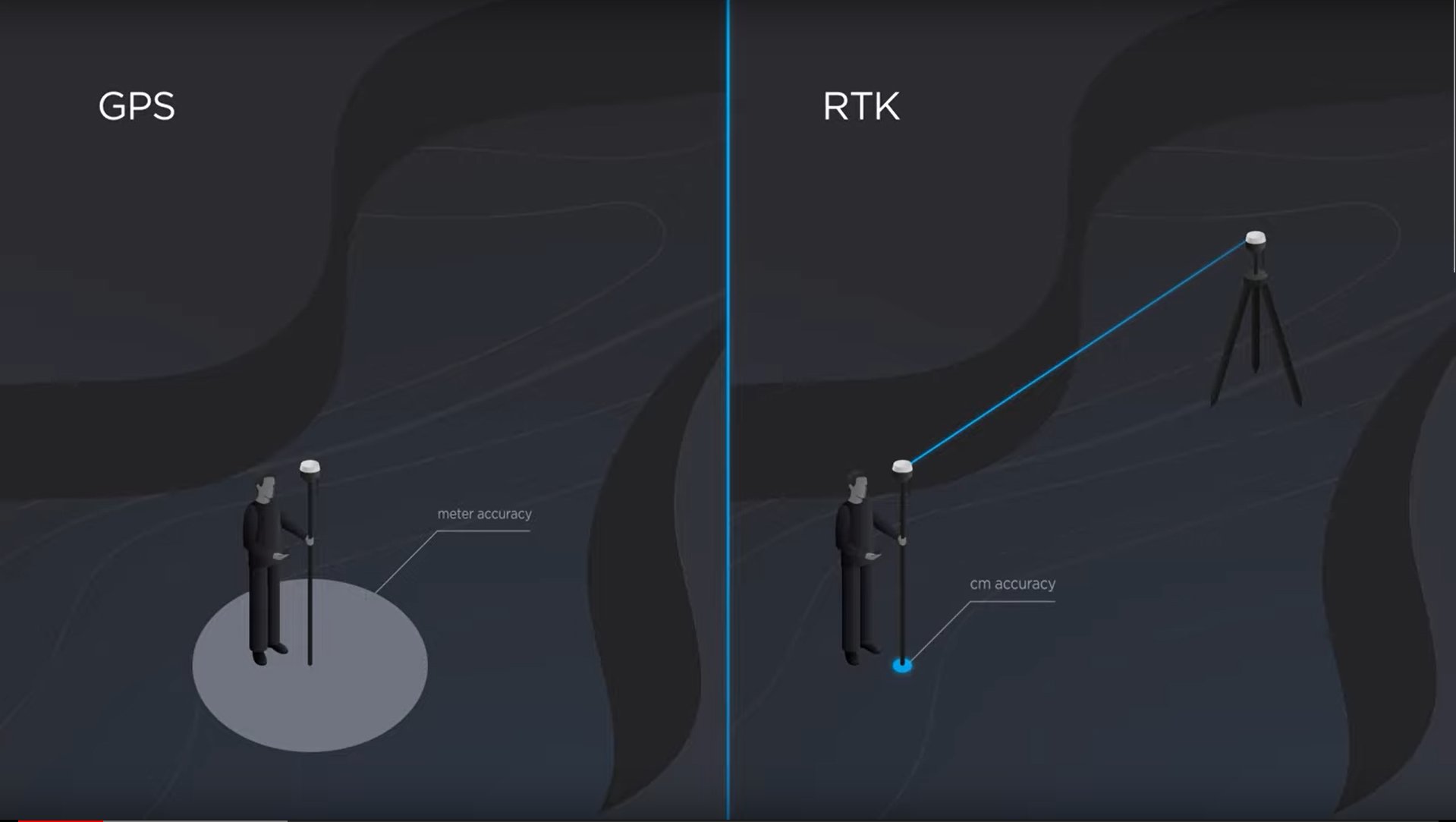
Das GPS in Drohnen hat eine Genauigkeit von 1-5m was es auf den ersten Blick für präzise Ergebnisse unbrauchbar macht. Mit der Verwendung von Korrekturverfahren wie RTK und Passpunkte können die Positionsdaten auf einen Zentimeter reduziert werden. Hierbei werden die ursprünglichen Daten anhand von Referenzpunkten und einer Referenzstation korrigiert und ermöglichen es jedem Hochpräzise Modelle zu generieren.
Relative und absolute Genauigkeit
Die Unterteilung der Genauigkeit in relative und absolute Genauigkeit spielt bei der Auswahl des geeigneten Equipments für die Vermessung eine entscheidende Rolle.
Die relative Genauigkeit beschreibt das Verhältnis zwischen den abgebildeten Objekten und ist damit für die präzise Bestimmung der Beziehungen zwischen diesen von großer Bedeutung. Absolute Genauigkeit hingegen bezieht sich auf die Position der Objekte innerhalb eines festen Koordinatensystems.
Eine hohe relative Genauigkeit ermöglicht es, die Distanzen zwischen zwei Objekten sehr präzise zu bestimmen. Absolute Genauigkeit hingegen legt den Fokus vor allem auf die Platzierung der Objekte innerhalb des Koordinatensystems.
Die relative Genauigkeit kann bei der Vermessung mit Drohnen durch die Verwendung von Fotogrammmetrie-Software erreicht werden, ohne dass zusätzliches Zubehör erforderlich ist. Allerdings ist die Genauigkeit in der x-y Ebene sehr hoch, während die Genauigkeit entlang der z-Achse (Höhe) variieren kann.
Um eine höhere absolute Genauigkeit zu erreichen, werden Korrekturverfahren wie Passpunkte, RTK oder PPK benötigt, die eine Genauigkeit von bis zu 1cm entlang aller Achsen ermöglichen.
Ist die absolute Genauigkeit immer notwendig?
Im Allgemeinen hängt die Wahl des richtigen Vermessungsequipments von den Anforderungen, dem Zweck und dem Terrain ab. Für Marketing generierte Modelle ist es selten sinnvoll, den zusätzlichen Aufwand zu betreiben, um absolut genau zu sein. Diese Modelle benötigen in der Regel nicht die gleiche Genauigkeit wie beispielsweise Baustellen oder Bauprojekte, bei denen geringere Toleranzen vorgegeben sind und es daher sinnvoll ist, Korrekturverfahren wie RTK oder PPK zu nutzen.
Flaches Terrain, bei dem es hauptsächlich um die Distanz und Fläche geht, kann oft ohne Korrekturverfahren gemessen werden. Jedoch sind bei genauen Höhenmodellen von unebenem Terrain Passpunkte, RTK oder PPK unverzichtbar. Diese Verfahren ermöglichen es, die Höhenpräzision zu verbessern und genauere Ergebnisse zu erhalten.
Insgesamt sollte man sich bei der Wahl des Equipments immer bewusst sein, welche Anforderungen es erfüllen muss und welche Anwendungen geplant sind, um die bestmögliche Wahl treffen zu können. Eine genaue Überlegung und Analyse der Anforderungen und des Terrains ist entscheidend, um die richtige Wahl treffen zu können.
Korrekturverfahren
Um absolute Genauigkeiten zu erreichen, gibt es derzeit drei Methoden in der Drohnenvermessung, welche unterschiedliche Vorteile und Nachteile haben.
Passpunkte
Die Verwendung von Ground Control Points (GCPs), auch bekannt als Passpunkte, ist derzeit eine der am häufigsten verwendeten Methoden in der Vermessung. Dieses Verfahren ermöglicht es, die Koordinaten von Karten und Modellen anhand bereits bekannter Punkte zu korrigieren.
Um diese Korrektur durchzuführen, werden in einem Gebiet Bodenmarkierungen platziert und mit einem RTK-Rover vermessen. Nachdem die GCPs und Drohnenaufnahmen in eine Fotogrammmetrie-Software importiert wurden, wird anhand der bekannten Koordinaten ein Modell generiert, das der gewünschten Genauigkeit entspricht. Zusätzliche Bodenmarkierungen können zusätzlich als Checkpoints genutzt werden und bieten die Möglichkeit der Genauigkeitskontrolle.
Obwohl dieses Verfahren drohnenunabhängig und sehr präzise ist, ist der Aufwand für Passpunkte im Vergleich zu anderen Methoden sehr hoch. Insbesondere bei großen und schwer zugänglichen Orten steigt der Aufwand exponentiell an. Diese Methode erfordert eine gründliche Planung und Vorbereitung, sowie das Setzen von Bodenmarkierungen und die Vermessung mit einem RTK-Rover, was Zeit und Ressourcen erfordert.
RTK/Real Time Kinematic
Die Verwendung von Real Time Kinematic (RTK) ermöglicht es, die Geodaten einer Drohne in Echtzeit anhand einer Basis-Station zu korrigieren. Diese Basis-Station wird auf einen bereits bekannten Referenzpunkt platziert, wodurch es möglich ist, die aus der Atmosphäre resultierenden Ungenauigkeiten zu ermitteln und zu korrigieren.
Diese Korrekturwerte werden direkt an die RTK-Drohne übertragen, um zentimetergenaue Geodaten zu errechnen. Durch die Verwendung von RTK entfällt das Passpunktemessen und die Nachbearbeitung, was den Prozess beschleunigt und den Aufwand reduziert. Es muss jedoch sichergestellt werden, dass die Drohne und die Basis-Station zu jeder Zeit eine Verbindung haben, um präzise Ergebnisse zu erzielen. Dies kann erreicht werden, indem man sicherstellt, dass die Basis-Station in einer stabilen Position platziert ist und die Drohne in der Nähe der Basis-Station fliegt.
PPK/Post Processing Kinematic
Im Vergleich zu RTK (Real Time Kinematic) erfolgt die Korrektur der Geodaten nach dem Flug. Hierbei wird ebenfalls, wie bei RTK, eine Basisstation als Referenzpunkt genutzt. Anhand der Flugdaten mit Zeitstempel werden die durch die Atmosphäre verursachten Unsicherheiten korrigiert und es werden neu berechnete Koordinaten mit Zentimetergenauigkeit erzeugt.
Empfehlung
RTK (Real Time Kinematic) und PPK (Post Processing Kinematic) sind fortschrittliche Technologien, die darauf abzielen, die traditionelle Methode der Verwendung von Kontrollpunkten auf dem Boden zur Verbesserung der Genauigkeit von Geodaten zu ersetzen. Jedoch haben Tests gezeigt, dass auch wenn RTK und PPK höhere Genauigkeiten erreichen, diese immer noch ungenauer sind als die Verwendung von Passpunkten. Die allgemeine Empfehlung ist daher, die Kombination von allen drei Methoden (RTK, PPK und Passpunkte) zu nutzen, um das bestmögliche Ergebnis in der optimalen Zeit zu erzielen.
Die zusätzliche Nutzung von Checkpoints ermöglicht die Qualitätskontrolle. Bei großzügigeren Toleranzen kann jedoch auf die Verwendung von Passpunkten verzichtet werden, um Zeit zu sparen.
Passpunkte setzen
Die Platzierung von Passpunkten ist entscheiden für die Genauigkeit der Modelle. Bei unebenen Arealen führt eine Platzierung auf unterschiedlichen Ebenen zu besserer Genauigkeit entlang der Z-Achse. Des Weiteren ist zu beachten, Passpunkte NICHT entlang einer Linie zu platzieren, sondern so gut wie möglich zu verteilen. In der Regel werden für eine Vermessung mit einer Genauigkeit von 1-2 cm pro Quadratmeter, etwa 10-15 GCPs pro Quadratkilometer empfohlen, jedoch ist dies stark Areal abhängig.
- Platzieren Sie GCPs und Checkpoints, bevor Sie mit der Aufnahme von Luftbildern beginnen. Diese Punkte sollten gut sichtbar und leicht zugänglich sein.
- Verwenden Sie ein GPS-Gerät wie das EMLID Reach RS2+, um die genauen Koordinaten jedes GCPs zu erfassen. Notieren Sie die Koordinaten.
- Starten Sie die Drohne und fliegen Sie sie über die GCPs, während Sie Luftbilder aufnehmen. Stellen Sie sicher, dass die Kamera der Drohne auf die GCPs ausgerichtet ist, wenn sie fotografiert werden.
- Verarbeiten Sie die Luftbilder nach dem Flug mit einer Software wie DJI Terra oder Pix4D, die die Verwendung von GCPs unterstützt. Geben Sie die Koordinaten der GCPs ein, die Sie zuvor erfasst haben, um die Genauigkeit der Luftbilder zu verbessern.
- Verwenden Sie die verbesserte Luftbildkarte für Anwendungen wie Landvermessung, Inspektion von Infrastruktur oder Erstellung von 3D-Modellen.